Assume you have an image F and you identify a point (x,y,z) on this image (say with SPM’s display function). You then normalize this image F according to a template image G using SPM. Now you want to know that point’s corresponding coordinate after normalization (x1, y1, z1). How do you do that?
If that point is still identifiable visually in the normalized image, then you can simply use SPM’s display function to get the coordinate. But if it’s not, or you have a lot of points to identify, you can use the following methods:
After normalization you will find a file called s_sn.mat. Load it, you will find several variables including Affine, VF, VG, etc. Now calculate conversion matrix M as
M = VG.mat * inv(Affine) * inv(VF.mat)
Now you can calculate the new coordinate as
New = M * [old; 1]
(old is column vector [x;y;z]; new is column vector [x1;y1;z1;1])

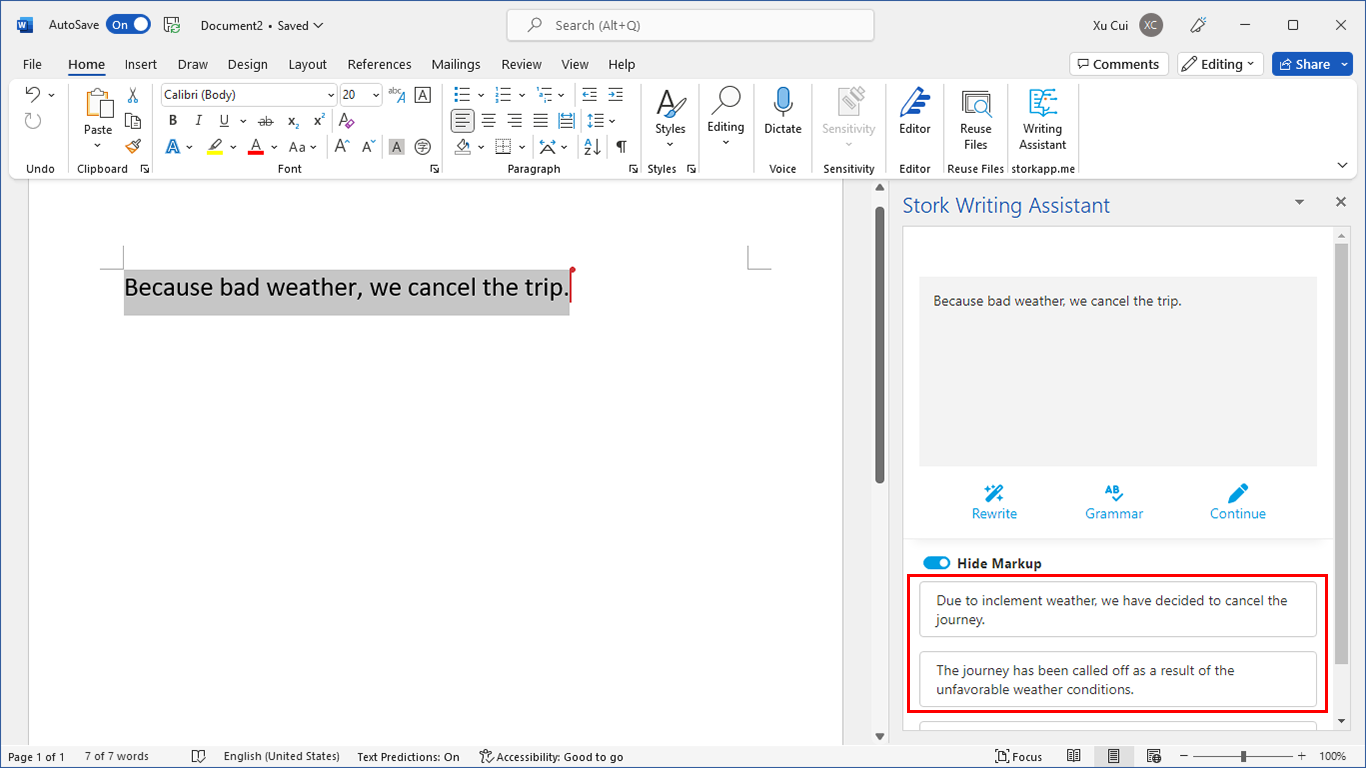
写作助手,把中式英语变成专业英文
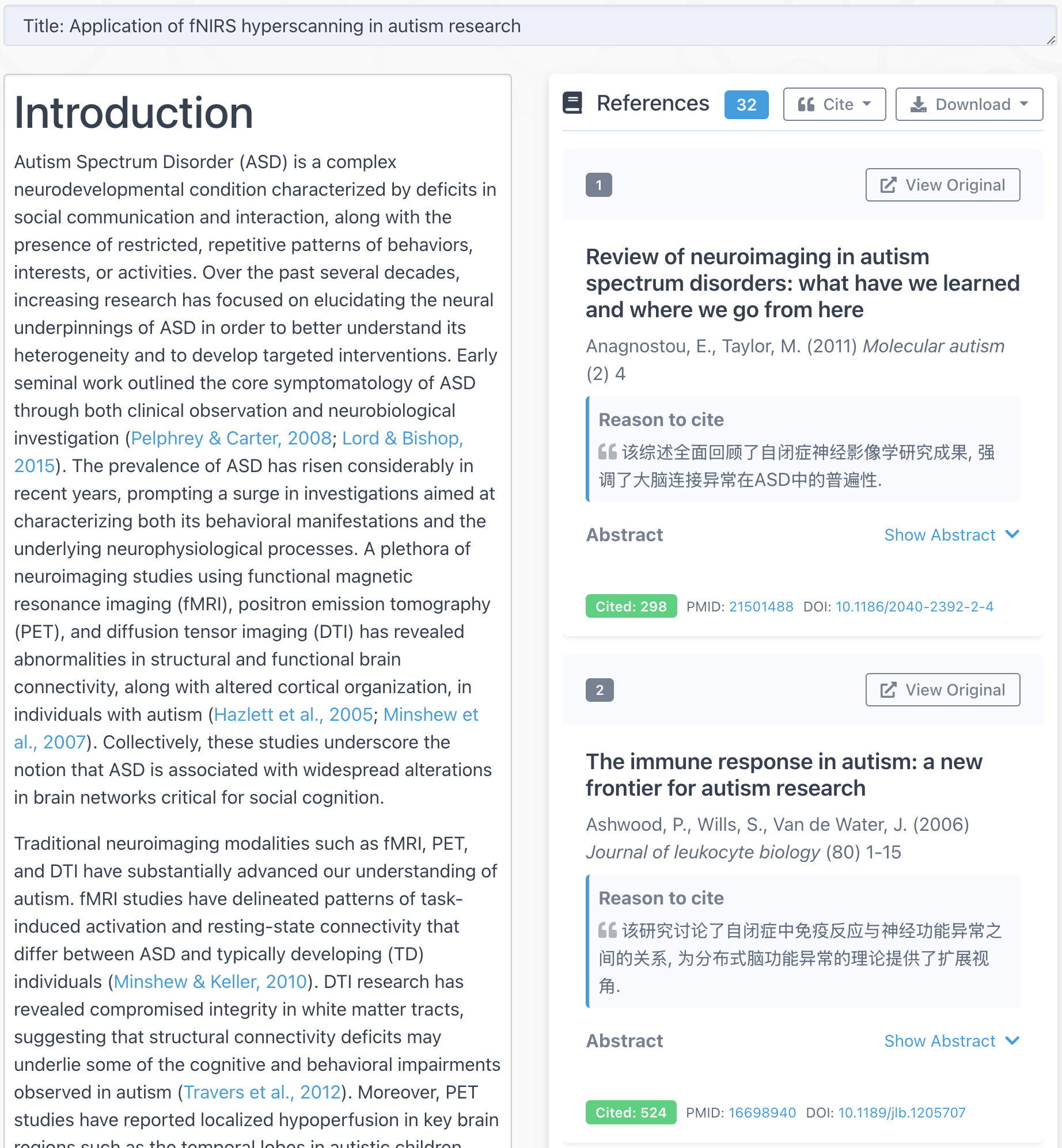
AI writing papers with real references